
Calibrate and Set Pixhawk 2.4.8
-

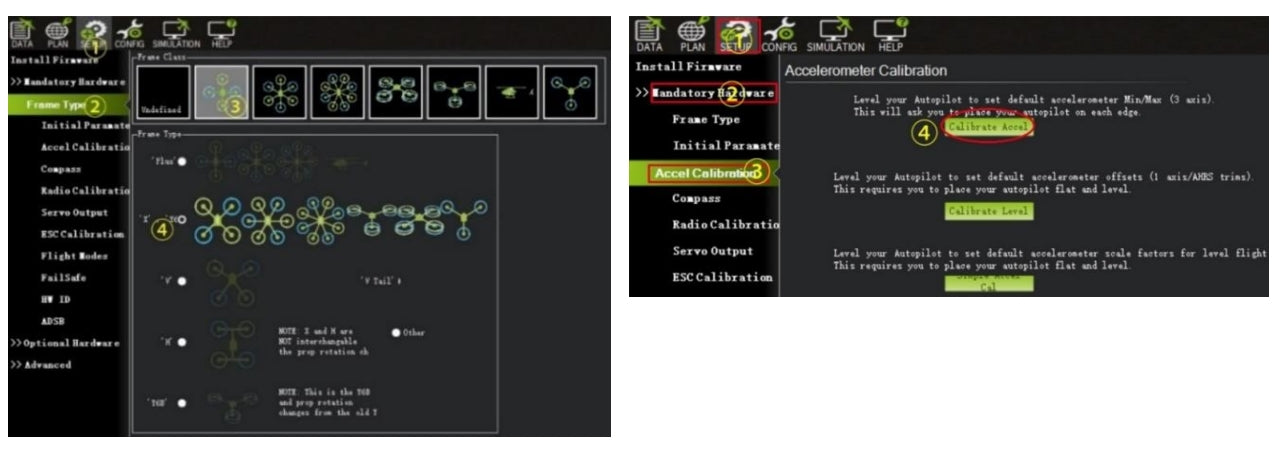
a. Select frame type b. Calibrate accel

-
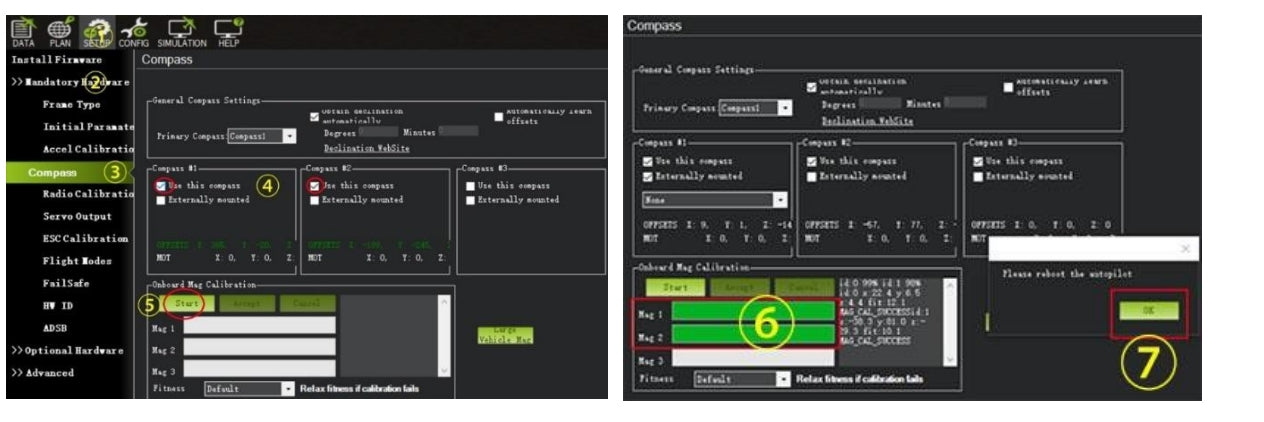
c. Calibrate compass
-
-

-

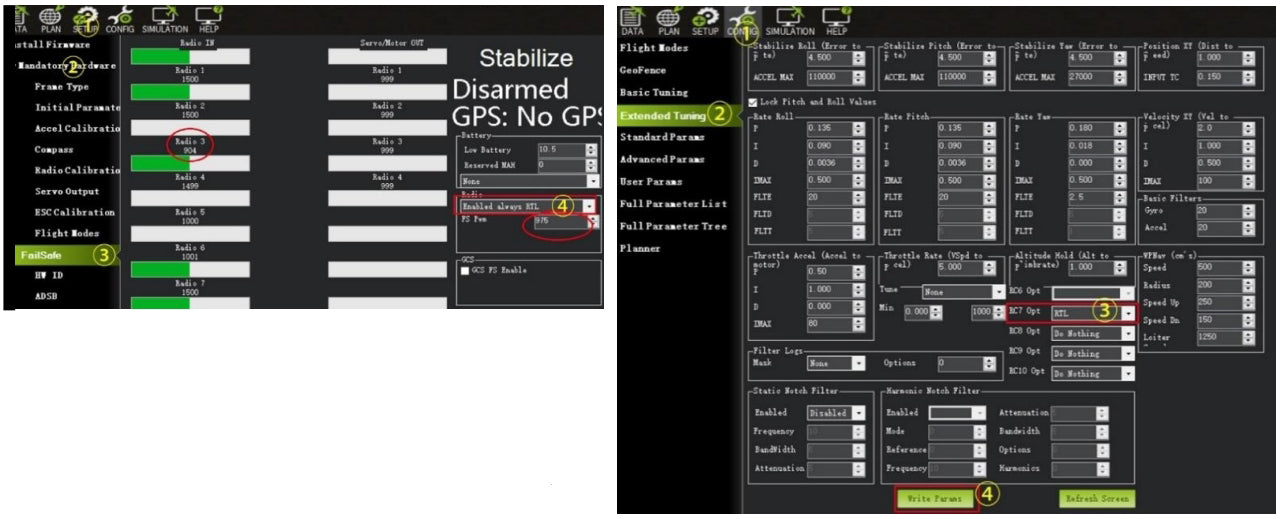
f. Set fail safe g. Set CH 7 RTL
-
Note.
Turn off transmitter to check if radio 3 value<975. It means RTL will start when signal lost. -









